
Inhaltsverzeichnis
|
Thema |
Seite |
|
4 |
|
|
4 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
14 |
|
|
22 |
|
|
23 |
|
|
24 |
|
|
27 |
|
|
27 |
|
|
28 |
|
|
31 |
|
|
32 |
|
|
33 |
|
|
34 |
|
|
34 |
|
|
36 |
|
|
37 |
|
|
39 |
|
|
40 |
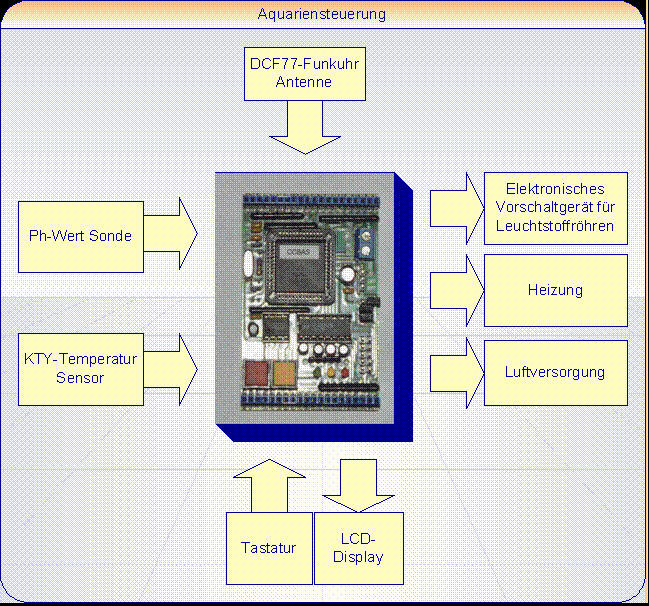
Aquariensteuerung mit Dämmerungsautomatik auf Basis des C-Control-Steuercomputer:
Die Idee zu diesem Projekt kam mir durch meine Welse, die nachts durchs
Aquarium schwimmen und, sobald die Aquarienbeleuchtung plötzlich
eingeschaltet wird, panisch ein Versteck aufsuchen. Dabei haben sie
durch schnelles Schlagen mit den Flossen die ein oder andere
Wasserpflanze entwurzelt und herausgerissen. Der C-Control-Steuercomputer
von Conrad-Elektronik basiert auf dem Mikrocontroller 68HC05B6. Er wird
mit der Programmiersprache Basic programmiert und verfügt über eine
große Anzahl an Ein- und Ausgängen
Durch die Ansteuerung eines elektronischen Vorschaltgeräts (EVG)
können Leuchtstoffröhren stufenlos hell und dunkel gedimmt werden. So
kann ein künstlicher Sonnenauf- und -untergang erzeugt werden. Dies
geschieht zu von einem Benutzer über Tasten eingegebenen Zeiten.
Auch die Länge der Dämmerung ist veränderbar. Die Uhrzeit wird über
einen DCF77- Funkuhrempfänger aktualisiert. Des weiteren wird die
Wassertemperatur geregelt, um sie auf tropischen Temperaturen zu halten.
Dazu wird die Temperatur gemessen. Übersteigt die Temperatur einen
vorher eingestellten Wert, wird ein Relais eingeschaltet. Wird die
Temperatur wieder unterschritten, so schaltet das Relais wieder aus. Die
Temperatur und der Ph-Wert werden zusammen auf einem LCD-Display
angezeigt.
Da Fische empfindlich auf Veränderungen des Ph-Wertes reagieren, wird
dieser zur Kontrolle mit einer Ph-Sonde gemessen und auf dem LCD-Display
angezeigt. Sollte der Ph-Wert unter 6,5 sinken oder eine
Wassertemperatur von 30°C
überschritten werden, schaltet ein Relais eine Luftversorgung ein, um
dem Aquarienwasser Sauerstoff zuzuführen. Dies ist sinnvoll, da in
warmem Wasser Sauerstoff schneller
entweicht und auch durch die Zufuhr von Sauerstoff kann der Ph-Wert
wieder erhöht werden. So kann vieles rund ums Aquarium automatisiert,
geregelt und kontrolliert werden. Dadurch können die Wasserwerte für die
Bewohner des Aquariums verbessert werden, und auf Veränderungen kann
schneller reagiert werden.
2.1. Der Steuercomputer
C-Control
Das Herzstück des C-Control-Steuercomputers ist ein Mikrocontroller.
In fast allen elektrischen und elektronischen Geräten sind
Mikrocontroller zu finden. Ob in der Waschmaschine, Stereoanlage, im
Auto oder in Maschinensteuerungen - überall übernehmen diese Bausteine
Aufgaben, die noch vor einigen Jahren mit komplexen Schaltungen gelöst
wurden. Heute genügt ein einziger Mikrocontroller, der durch
unterschiedliche Programmierung fast alle Aufgaben erledigen kann. Mit
C-Control hat Conrad ein Mikrocontrollersystem geschaffen, das sehr
flexibel, ausbaufähig und vor allem preiswert ist.
Ein Mikrocontroller ist ein Prozessor. Der Unterschied zu PC-Prozessoren
besteht darin, dass bei einem Mikrocontroller Speicher, Digital- und
Analog-, Ein- und Ausgänge etc. meist auf einem einzigen Chip integriert
sind, so dass eine Mikrocontroller-Anwendung oft mit ein paar wenigen
Bauteilen auskommt.
Mikrocontroller werden als erstes an der Bit-Zahl des internen
Datenbusses unterschieden: 4 Bit, 8 Bit, 16 Bit und 32 Bit. Diese
Bit-Zahl kann man als die Länge der Daten interpretieren, die der
Controller in einem Befehl verarbeiten kann. Die größte in 8 Bit (=1
Byte) darstellbare Zahl ist die 255. Somit kann ein 8 Bit-
Mikrocontroller, z.B. in einem Additionsbefehl, immer nur Zahlen kleiner
als 255 verarbeiten. Zur Bearbeitung von größeren Zahlen werden dann
mehrere Befehle hintereinander benötigt, was natürlich länger dauert.
Ein Mikrocontroller braucht zum Betrieb, wie jeder andere Prozessor
auch, eine extern eingespeiste Taktfrequenz. Die maximale Frequenz mit
der ein Controller betrieben werden kann, reicht von 1 MHz bei alten
Controllern, bis hin zu über 100 MHz bei teuren 32-Bittern. Diese
Taktfrequenz sagt jedoch noch nichts über die tatsächliche
Geschwindigkeit eines Prozessors aus. So wird z.B. bei 8051-Controllern
die Frequenz intern durch 12 geteilt. Ein mit 24 MHz getakteter 8051
arbeitet also intern mit 2 MHz. Benötigt dieser dann für einen Befehl
durchschnittlich 2 Taktzyklen, so bleiben "nur" noch 1 Mio. Befehle pro
Sekunde übrig.
Der Ein-Chip-Mikrocontroller des C-Control Steuercomputers ist ein
MC68HC05B6 von Motorola und arbeitet mit einer Taktfrequenz von 4 MHz.
Er besitzt ein 6 k Byte großes maskenprogrammiertes Betriebssystem. Zur
Speicherung von einem Anwenderprogramm bzw. Daten dient ein serieller
EEPROM, der Mikrochip 24C65, der über eine I2C-Schnittstelle angesteuert
wird. Er verfügt über eine Kapazität von 8 k
x 8 Bit und behält
seinen Inhalt auch bei abgeschalteter Stromversorgung.
Weiterhin verfügt der Mikrocontroller über einen 240 Byte großen RAM.
Der größte Teil dieses Speichers ist für Betriebssystemfunktionen
vorgesehen. 24 Bytes stehen dem Anwender zur Verwendung.
An den 2 zwanzigpoligen Buchsenleisten sind alle verwendbaren Ports
sowie einige Systemsignale des Steuercomputers herausgeführt. Der C-Control-
Steuercomputer besitzt 16 digitale Ein-/Ausgänge. Weiterhin besitzt der
Steuercomputer 8 analoge Eingänge, die intern mit 8 Bit digitalisiert
werden. An diese Eingänge können Sensoren zur Messwerterfassung
angeschlossen werden. Außerdem stehen 2 analoge Ausgänge zur Verfügung,
die ein pulsweitenmoduliertes Rechtecksignal erzeugen. Über eine
serielle RS232 Schnittstelle kann ein auf einem PC erstelltes Programm
in das EEPROM des Steuercomputers übertragen werden. Danach kann der C-Control-
Steuercomputer als eigenständiges System betrachtet werden.
2.2. Technische Daten:
|
Betriebsspannung Ub |
5V stabilisierte Gleichspannung, ±0,5V |
|
Stromaufnahme |
ca. 30 mA, < 10 mA bei abgeschalteten LED's und
RS232-Interface |
|
Abmessungen |
ca. 80 mm x 50 mm |
|
Mikrocontroller |
Motorola MC68HC05B6 bei 4 MHz, 6 Kilobyte
maskenprogrammiertes Betriebssystem |
|
Speicher für Anwenderprogramm und -daten |
Microchip 24C65, serielles EEPROM 8k x 8 Bit |
|
A/D - Ports |
8 x 8 Bit A/D, 0...5 Volt gegen gemeinsame Masse |
|
Digitalpots |
16 Stück, frei als Ein- oder Ausgang programmierbar, 10k
Pull-Up |
|
D/A - Ports |
2 pulsweitenmodulierte Ausgänge, PWM-Rate 1953 Hz |
|
DCF77 - Eingang |
Digitalport mit 10k Pull-Up zum Anschluss einer
DCF77-Aktivantenne (Funkuhr) mit Open-Collector-Ausgang |
|
serielle Schnittstelle |
RS232 mit Pegelwandler MAX232 oder Austauschtyp |
|
Preis (C-Control Unit): |
ca. 50 € |

Die
Programmiersprache des C-Control- Steuercomputers ist ein Basic-Dialekt.
Die Syntax entspricht in etwa der des Standard-Basic. Im Gegensatz zu
anderen vergleichbaren Systemen wird jedoch nicht der Quelltext des
Programms an das System gesendet, sondern ein verkürzter Zwischencode,
der Basic-Schlüsselwörter durch ein Byte große Basic-Tokens (einen
Einzeichenkode der hexadezimal angegeben wird)
ersetzt. Im System selbst ist kein Zeileneditor erforderlich. Vielmehr
erfolgt die Programmerstellung, die Syntaxprüfung und die Übertragung in
den Zwischencode in der PC-Software.
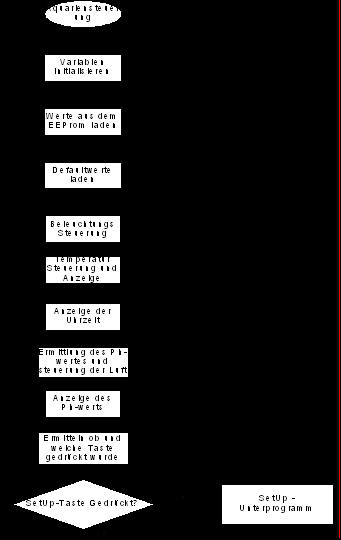
2.4. Die Programmabarbeitung
Das Basic-Programm liegt in Form von Tokens im EEProm. Nach dem Start
des Betriebsprogramms liest der Mikrocontroller die Tokens und führt
entsprechende Aktionen aus, indem die zugeordneten Prozeduren aus dem
ROM aufgerufen werden. Dieses Verfahren hat
den Nachteil, dass Programme langsamer laufen als mit einem
reinem Maschinencode. Dafür aber lassen sich mit einem Interpreter
relativ komplexe Programme mit wenig Speicherbedarf schreiben, so dass
man noch genügend Platz für Messdaten und Tabellen behält.
Das Basic des C-Control kennt keine Fließkomma-Arithmetik wie andere
Basic-Dialekte. Die verwendeten Zahlentypen sind das Bit, das Byte und
die Integerzahl. Für die meisten typischen Mikrocontroller-Aufgaben
stellt dies jedoch kaum eine Einschränkung dar, weil es meist darum geht
Ausgangsleitungen zu steuern oder Ergebnisse an einen 8 Bit DA-Wandler
zu senden.
Die zweite wesentliche Einschränkung des Systems betrifft die
Ausführungsgeschwindigkeit im Millisekundenbereich gegenüber
Befehlszeiten im Mikrosekundenbereich für reine Maschinenprogramme. Wenn
es jedoch auf höhere Geschwindigkeiten ankommt, bietet C-Control-Basic
jedoch die Möglichkeit, kleine Maschinen-Unterprogramme im EEProm des
Prozessors zu starten.
2.5. Anschließen von zusätzlichen Komponenten
An den 2 zwanzigpoligen Buchsenleisten werden alle verwendbaren Ports
sowie einige Systemsignale des Steuercomputers herausgeführt. Durch die
Bauform der Buchsenleisten kann der Steuercomputer auf andere
elektronische Baugruppen aufgesteckt werden, wobei Taster, Leuchtdioden
und Stiftleisten zugänglich bleiben.
Man kann den Steuercomputer als ein großes IC betrachten, das nach
eingesetztem Programm unterschiedliche Aufgaben in einer Steuerung
ausführen kann.
Der Prozessor des C-Control-Steuercomputers verwendet bidirektionale
Ports, deren Datenrichtung in einem besonderen Register umgeschaltet
werden. Schaltet man ihn als Ausgang um, dann erhält man einen
Gegentaktausgang, der in beiden Zuständen „AN“ und „AUS“ niederohmig
ist. Der Ausgang kann also Lasten sowohl gegen Masse als auch gegen die
Betriebsspannung treiben. Es ist aber wichtig,
dass Leuchtdioden oder Transistoren, die ebenfalls niederohmig
sind, nicht ohne Vorwiderstand mit der C-Control verbunden werden.
Wird der C-Control im Autostartmodus betrieben, so müssen
Vorsichtsmaßnahmen zum Schutz des Programms im EEProm getroffen werden.
Wenn das Programm nämlich bei Ausschalten des Hauptschalters nicht den
„END“ -Befehl oder ein Reset bekommt, kann es beschädigt werden.
Anschließend wäre dann eine Neuprogrammierung erforderlich. Um dies zu
vermeiden kommt folgende Schaltung zum Einsatz.
Unterschreitet die Betriebsspannung einen Wert von 4,7 V, wird der
Resteingang auf Masse geschaltet und so ein Reset ausgelöst. Alternativ
kann auch ein IC MAX809L des Herstellers „Maxim“ verwendet werden.
'****************************************************************************************************
*********************************
5.1 Universelles symmetrisches Netzteil
In Europa steht an den üblichen Haushaltssteckdosen eine Wechselspannung
von 230 V mit einer Frequenz von 50 Hz zur Verfügung.
Um damit eine elektronische Schaltung betreiben zu können, muss diese
Spannung zunächst passend aufbereitet werden. Die Schaltung ist einfach
aufgebaut. Positver und negativer Versorgungsspannungszweig sind
symmetrisch zueinander.
Durch das Netzkabel gelangt die Netzspannung zunächst an den
Transformator. Der TrafoT1 besitzt zwei Sekundärwicklungen bzw. eine
Sekundärwicklung mit Mittelanzapfung. TR1 transformiert die Netzspannung
auf etwa 2 x 12 V – 15 V herunter. Der Mittelpunkt der beiden
Sekundärwicklungen ist mit der Schaltungsmasse verbunden. Die beiden
anderen Ausgänge des Trafos gehen an die Wechselspannungseingänge des
Brückengleichrichters B1. Dieser wandelt die Wechselspannung in
pulsierende Gleichspannung um. Die Ladekondensatoren C1und C2 glätten
diese pulsierende Spannung zu einer Gleichspannung. Die Kondensatoren C3
und C4 sollen Störungen aus dem Netz unterdrücken und die Schwingneigung
der nachfolgenden ICs dämpfen.
Hauptbestandteil dieser Schaltung sind die
Festspannungsregler IC1, IC2, IC3 und IC4. IC1 ist vom Typ 7812,
der die positive Spannung auf +12 V regelt, während IC2, vom Typ 7912,
die negative Spannung auf -12 V konstant hält. IC3 ist vom Typ 7905 und
für die positiven +5 V verantwortlich und IC4 ist ein 7805 der negative
–5 V liefert.
C7, C8, C9 und C10 sind
notwendig, um die ICs am Schwingen zu hindern. Ohne diese Kondensatoren
würden sie sonst mit etwa 1 MHz schwingen. Die Kondensatoren C5 und C6
sollen das Regelverhalten der
ICs verbessern.
Wie schon oben beschrieben, arbeitet die Schaltung jeweils mit jeweils
zwei zueinander komplementären Festspannungsreglern. Dieses ist eine
einfache, kostengünstige und platzsparende Möglichkeit. Unabhängig von
dem Ausgangsstrom werden hierfür IC1und IC3 sowie IC2 und IC4 Typen
eingesetzt, die Ströme bis zu 1 A (je nach Hersteller auch etwas mehr)
regeln können. Praktischerweise werden hierfür Regler im TO 220-Gehäuse
verwendet. Für die Dimensionierung der Schaltung ist es wichtig zu
wissen, dass diese ICs zum Betrieb eine Spannung benötigen, die um 3 V
höher sein sollte, als die Ausgangsspannung. Bei einer Ausgangsspannung
von 12 V bzw. 5 V sollte die Eingangsspannung also mindestens 15 V bzw.
5 V betragen. Andererseits darf die Eingangsspannung 35 V nicht
überschreiten.
Um die Spannungsregler mit einer ausreichenden Spannung versorgen zu
können, sollte der Trafo zwei Sekundärwicklungen mit je 15 V oder eine
Sekundärwicklung von 30 V mit Mittelabgriff besitzen.
Die Stromstärke, die der Trafo abgeben kann, sollte etwa um den Faktor
1,5 über dem tatsächlich benötigten Wert liegen. Der Grund hierfür
besteht darin, dass der Strom nicht kontinuierlich fließt, sondern stark
pulsiert, wobei relativ hohe Spitzenwerte erreicht werden können. Im
Zweifelsfall ist das Netzteil eher größer zu dimensionieren. Nach der
Gleichrichtung und Glättung kann die Spannung also Werte von über 30 V
annehmen. Das mag zunächst als recht viel erscheinen, jedoch bricht
diese Spannung unter Belastung schnell auf niedrigere Werte zusammen.
Wegen der hohen möglichen Leerlaufspannung müssen C1 und C2
Spannungsfestigkeiten von mindestens 35 V besitzen. Da der Gleichrichter
B1 beide Trafowicklungen gleichrichtet, muss seine Spannungsfestigkeit
sogar doppelt so hoch sein.
Die Ladekondensatoren C1 und C2 sollen die pulsierende Gleichspannung
ausreichend glätten. C3, C4, C7,C8,C9 und C10 müssen Folienkondensatoren
sein, da diese eine geringere Eigeninduktivität besitzen und so
Störungen und Schwingneigungen wirksamer unterdrücken können. Für C5 und
C6 sollten Tantalelkos mit einer Spannungsfestigkeit von mindestens 35 V
verwendet werden.
Tantalelkos verfügen ebenfalls über eine geringere Eigeninduktivität und
sind somit besser geeignet, Störungen zu unterdrücken als normale Elkos.
Bei den Spannungsreglern ist zu berücksichtigen, dass der negative
Regler eine etwas andere Anschlussbelegung besitzt als der positive. Bei
dem negativen sind gegenüber dem positiven Regler Eingang und Masse
miteinander vertauscht. Das kann zu Verwechslungen führen. Außerdem hat
dies zur Folge, dass bei dem negativen Spannungsregler nicht die Masse,
sondern die negative Eingangsspannung am Gehäuse des IC anliegt. Aus
diesem Grunde muss das negative Regel-IC isoliert werden, wenn es
gemeinsam mit dem positiven Regler auf einen Kühlkörper montiert werden
soll.
Achtung: Da beim negativen Spannungsregler die Versorgungsspannung am
Gehäuse anliegt, darf er nicht mit anderen Bauteilen der Schaltung oder
dem Gerätegehäuse in Berührung kommen.
5.2. Ansteuerung des EVG zum Dimmen von Leuchtstoffröhren
Aufbau eines elektronischen Vorschaltgeräts:
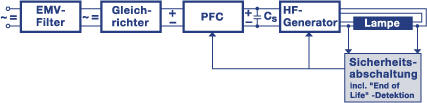
Ein
EVG (elektronisches Vorschaltgerät) dient zum Ansteuern von
LSR(Leuchtstoffröhren). Mit bestimmten Typen können LSR sogar gedimmt
werden.
Der EMV-Filter im EGV filtert Hochfrequente Störungen des EVG.
Anschließend macht der Gleichrichter aus Wechselstrom Gleichstrom. Der
PFC korrigiert Netzschwankungen. Unabhängig von der Netzspannung wird
die Gleichspannung auf einen bestimmten Wert geregelt, damit die
Leuchtstoffröhren keine Netzschwankungen spüren.
Der HF-Generator ist das Herzstück des EVG. Bei einer Arbeitsfrequenz
von ca. 40 bis 50 kHz werden 25% bis 30% Energie gespart im Vergleich zu
herkömmlichen Systemen. Durch ständiges Abfragen des Lampenzustandes
während des Betriebs, wird der nahende „End of Life“ –Zustand erfasst
und der EVG zuverlässig abgeschaltet.
Ich verwende den
OSRAM Quicktronic de Luxe HF 2x18/230-240DIM.
Allgemeiner Hinweis:
·
Versorgungsspannung: 230 V/240 V
·
Netzfrequenz: 0/50 bis 60 Hz
·
Lampenstart: Warmstart innerhalb von 2 Sek.
·
Prüfzeichen:
![]()
![]()
![]()
![]()
·
Funkentstörung: gem. DIN VDE 0875/CISPR 15/EN 55015
·
Netzstromoberwellen: gem. DIN VDE 0712 Teil 23/EN 61000-3-2/EN 60929
·
Immunität, Störfestigkeit gem. EN 61547

Mit diesem elektronischen Hochfrequenz-System können handelsübliche
Leuchtstofflampen von 1 % bis 100 % Lichtstrom über eine Steuerleitung
mit 1 - 10 V DC gedimmt werden.
Die Steuerung funktioniert nur in Zusammenarbeit mit einer
Stromabschaltung, da das EVG keinen Anschluss für eine Totalabschaltung
hat. Dies bedeutet, die Stromabschaltung schaltet die Leuchten samt EVG
und Dimmersteuerung an und wieder aus. In der eingeschalteten Zeit kann
die Helligkeit hoch und herunter gedimmt werden.
Die 0 – 10 V-Steuerleitung eröffnet vielfältige Anschlussmöglichkeiten.
In diesem Fall wird sie an die Aquariensteuerung angeschlossen, die auch
die 230 V Versorgungsspannung für das EVG abschaltet. Hierfür wird eine
Relais-Schaltung benötigt.

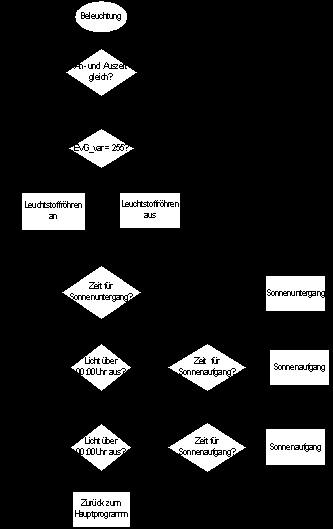
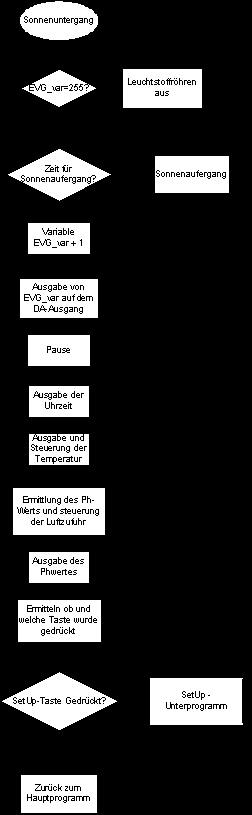
Im C-Control, im Unterprogramm „Licht“, wird zuerst geprüft, ob die
Variable EVG_var, die zum hoch- und herunterzählen dient und deren Wert
später dem Analogausgang übergeben wird, NULL ist. In diesem Fall wird
der Digitalport, der das Relais für die 230 V-Versorgung des EVG
schaltet, auf AUS gesetzt, sonst auf EIN. Sollten die Variablen für das
Einleiten des Lichtherunterdimmens gleich der Uhrzeit sein, wird in das
Unterprogramm „Untergang“ gesprungen. Im Unterprogramm wird die Variable
EVG_var bei jedem Durchgang um 1 heruntergezählt und auf den
Analogausgang übertragen. Hat die Variable den Wert 0 erreicht, dann
erhält der EVG-Port ein AUS und es erfolgt ein Rücksprung ins
aufgerufene Programm. Damit die LCD-Anzeige und weitere Steuerungen
weiterlaufen, werden in der Programmschleife die entsprechenden
Unterprogramme aufgerufen.
Da, wenn das Licht über 0:00 Uhr eingeschaltet sein soll, andere
Bedingungen gelten, als wenn es zum Tageswechsel aus ist, werden im
Unterprogramm „Licht“ diese geprüft. Es wird in entsprechende
Unterprogramme verzweigt. Dies ist nötig, damit die Beleuchtung nach
einem Stromausfall wieder eingeschaltet wird. Ist in dem entsprechenden
Unterprogramm, die Bedingung erfüllt, dass die Uhrzeit gleich der Zeit
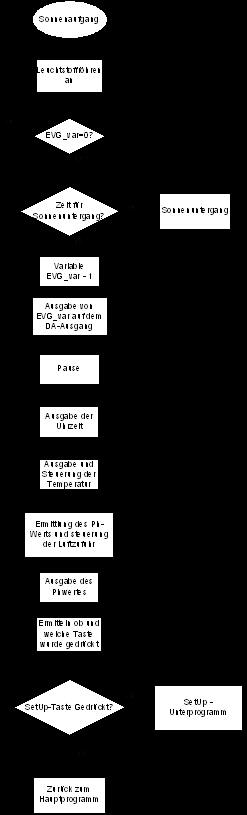
für das Lichthochdimmen ist, wird in das Unterprogramm „Aufgang“
gesprungen. In diesem wird der EVG-Port auf EIN gesetzt, die Variable
EGV_var bis 255 hochgezählt und die Variable auf den Analogausgang
ausgegeben.
Sollte während der Programmschleife die Uhrzeit gleich der Zeit zum
Lichtherunterdimmen sein, wird in das Unterprogramm „Untergang“
gesprungen. Auch hier werden weitere Unterprogramme aufgerufen, damit
die LCD-Anzeige und weitere Steuerungen weiterlaufen.
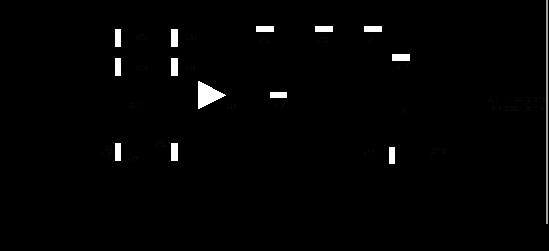
Der
Steuercomputer liefert am Digital-/Analogausgang ein
pulsweitenmoduliertes Signal von 0 V bis 5 V. Zur Ansteuerung des EGV
wird aber eine Gleichspannung von 0 V bis 10 V benötigt. Deshalb muss
ein Operationsverstärker mit einer Verstärkung von 2 zwischengeschaltet
werden, der außerdem mit einem Kondensator das pulsierende Signal des
Controllers in ein echtes Analogsignal umwandelt. Hierfür wird der
Operationsverstärker LM358 benutzt. Er arbeitet auch bei einer
unipolaren Versorgung bis nahe an 0 V heran. Der Tiefpass, aus R1 = 25 k
Ohm und C11 = 0,1µ F bestehend, ergibt eine Restwelligkeit von 20 mV.
Mit den Widerständen R2 = 100 k Ohm und R3 = 0 bis 100 k Ohm kann der
Verstärkungsfaktor von 1 bis 2 stufenlos eingestellt werden. Dies wird
berechnet mit der Formel
![]() .Durch den Kondensator
C12 = 0,1 µ F wirkt der OP-Verstärker ebenfalls als Tiefpass, wodurch
eine Restwelligkeit von 5 m V erreicht wird. Dies und der relativ
hochohmige Ausgang sollten für die Ansteuerung des EVG reichen.
.Durch den Kondensator
C12 = 0,1 µ F wirkt der OP-Verstärker ebenfalls als Tiefpass, wodurch
eine Restwelligkeit von 5 m V erreicht wird. Dies und der relativ
hochohmige Ausgang sollten für die Ansteuerung des EVG reichen.
Zum Umbau des Leuchtbalkens muss dieser geöffnet und die gesamte
Elektronik ausgebaut werden, auch die Starter. Die Starterdeckel müssen
nach Ausbau der Starterfassungen zwecks Wasserdichtigkeit wieder
einklebt werden (mit Silikon oder Heißkleber). Danach muss das
Vorschaltgerät eingebaut und gemäß Aufdruck auf diesem im Leuchtbalken
verdrahtet werden. Auf der rechten Seite werden die Röhrenfassungen
angeschlossen, auf der linken Seite befinden sich die Anschlüsse für die
Netzspannung (230 V) und der Steuereingang (0 - 10 V). Die 1 - 10 V
Steuerleitung habe ich auch durch die 230 V-Leitung geführt. Danach
müssen die Leuchtbalken wieder zusammengebaut und alles mit Silikon
wasserdicht abgedichtet werden.


5.3. Die Messverstärker:
5.3.1. Die Temperaturmessung mit dem KTY-Sensor
Bei Temperaturmessungen mit Widerstandsthermometern wird als
Temperaturfühler ein Messwiderstand verwendet, dessen Widerstand sich
mit der Temperatur ändert. Mit Hilfe der Brückenschaltung wird die
Widerstandsänderung in ein elektrisches Signal gewandelt. Ein konstanter
Strom wird durch die Schaltung geschickt. Der Spannungsabfall über dem
Messwiderstand wird gemessen und mit einer konstanten Spannung
verglichen. Die Messbrücke ist so bemessen, dass bei 15
°C
die Spannungen der beiden Spannungsteiler den selben Wert haben. Steigt
die Temperatur an, so steigt auch die Differenz zwischen den
Spannungsteilern. Die Spannung am invertierenden Eingang des als
Differenzverstärker geschalteten Operationsverstärker vom Typ 741 wird
größer. Dadurch steigt auch die Spannung am Ausgang des
Operationsverstärkers. Der nachfolgende Transistor liniearisiert und
verstärkt das Signal so, dass bei 40,5
°C
5 V am Collektor anliegen.
Der Einfluss des Zuleitungswiderstandes und seiner temperaturabhängigen
Änderung auf das Messergebnis ist nicht zu vernachlässigen. Man benötigt
Kompensationsverfahren (zum Beispiel den Widerstand der Messleitungen
einfach abziehen). Dies ist allerdings nachteilhaft, da sich der
Widerstand der Messleitungen, wie schon erwähnt, selber verändern kann.
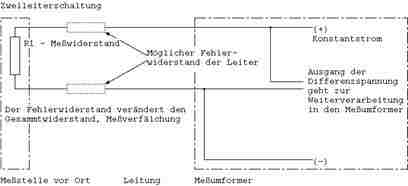
Deshalb gibt es auch mehrere Anschlussarten für Messfühler. Ich verwende
die Zweileiterschaltung. Wie der Name vermuten lässt, arbeitet die
Zweileitermessschaltung mit zwei Messleitungen. Damit das Messergebnis
nicht durch Eigenerwärmung des Messwiderstandes und der Messleitungen
beeinflusst wird, sollte der Messstrom 5 mA nicht überschreiten. Zum
Ausgleichen des Messleitungswiderstandes wird der Widerstand R35
eingestellt, bis die angezeigte Temperatur mit der eines relativ genauen
Thermometers übereinstimmt.
Der eingesetzte KTY 10 ist ein kleiner Silizium-Sensor von der Firma
„Infineon“. Er hat einen positiven Temperaturkoeffizienten und dessen
Änderungen im Bereich der Raumtemperatur ±20 °C sind nahezu linear, was
weitere Auswertungen erleichtert. Aufgrund seiner kleinen Abmessungen,
reagiert er sehr schnell auf Temperaturveränderungen.
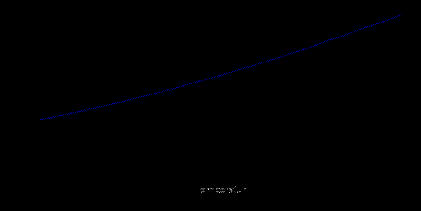
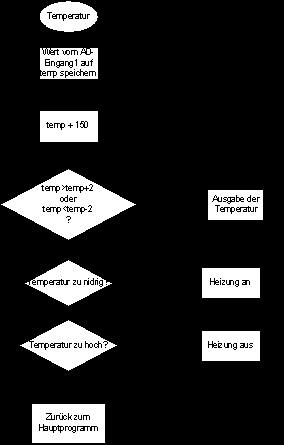
Die Ausgangsspannung beträgt 0 - 5 V linerarisiert, so dass im
Controller eine einfache Umrechnung des Analogwertes genügt. Zum
Auswerten des Temperatursignals wird dieses vom Analogwandler im C-Control
in einen Wert gewandelt und auf der Variablen temp abgelegt.
Anschließend wird der Wert in der Variablen um 150 erhöht. Dies
entspricht einer Temperatur von kleiner/gleich 15,0
°C.
Danach wird der Wert mit einem von einem Benutzer eingegebenen Sollwert,
der in der Variablen tempsoll gespeichert ist, verglichen. Ist
die Temperatur 0,5
°C
unter dem Sollwert, schaltet ein Digitalport ein Relais ein, welches
eine Heizung ansteuert. Um ein Relaisklappern zu verhindern, wird es
erst bei 0,5
°C
über dem Sollwert ausgeschaltet.
5.3.2. PH-Wertsonde und die Schaltung zur Messwertauswertung
Der pH-Wert beschreibt eine der wichtigsten chemischen Eigenschaften des
Aquariumswassers, das Gleichgewicht zwischen Säuren und Basen. Enthält
Wasser mehr Säuren als Laugen, dann ist es sauer. Enthält es mehr Laugen
als Säuren, dann ist es alkalisch. Befinden sich Säuren und Laugen im
Gleichgewicht, ist das Wasser neutral. Die pH-Wert-Skala reicht von 1
bis 14. Neutrales Wasser hat den pH-Wert 7. Wasser mit einem pH-Wert
unter 7 ist sauer. Wasser mit einem pH-Wert über 7 ist alkalisch.
Alle Fische, Pflanzen und Mikroorganismen reagieren sehr sensibel auf
drastische und schnelle Änderungen des pH-Wertes. Ein pH-Wert zwischen
6,5 und 8,5 ist für fast alle Süßwasserfische gut geeignet.
Der pH-Sensor:
Der Sensor ist vom elektrischen Prinzip her nichts weiter als eine
Batterie, die je nach Säuregehalt die Spannung ändert. Im Idealfall
liefert sie 0 V bei pH 7 und dann ca. 59 mV pro 1 pH, wobei diese bei
höheren pH-Werten die Spannung verringert, und bei niedrigerem pH-Wert
(<7) die Spannung erhöht.
Die Sensoren bestehen in den meisten Fällen aus einem Glasröhrchen mit
einem sehr dünnen Ende (der Membran). Dieses Ende ist durchlässig für
Flüssigkeiten und erlaubt den im Röhrchen liegenden Teilen die Messung
des Säuregehaltes. Im Röhrchen befinden sich verschiedene Elektroden
sowie eine Flüssigkeit oder

Diese Bilder zeigen 2 Elektroden; Bildquelle:
Schott
Die Spannungen in der Übersicht:
|
pH |
Spannung |
|
9 |
2 x -59 mV= -118 mV |
|
8 |
- 59 mV |
|
7 |
0 V |
|
6 |
59 mV |
|
5 |
2 x 59 mV=118mV |
Wenn man nun eine Schaltung haben möchte, die diese Spannung in ein
verwertbares Signal überführt, muss man folgendes tun:
1. Man muss das Signal verstärken, je nachdem, wie viel Volt man später
haben möchte. Möchte man z.B. 1 V / pH haben, muss man die Verstärkung
auf 1/0.059 = ca. 17 erhöhen. Man muss sich also entscheiden.
Bei der untenstehenden Schaltung habe ich 0,35 mV/pH gewählt. Das ergibt
dann 0,35/0.059 = 5,93
»
6.
2. Man muss das Signal invertieren, damit es richtig herum angezeigt
wird. Man möchte ja schließlich bei einem steigenden pH- auch einen
steigenden Messwert erhalten. Sonst würde
man bei steigendem Ph-Wert einen fallenden Messwert erhalten.
3. Mann muss eine Offsetspannung zum Signal addieren, damit man einen liearen Bereich bekommt.

PH 5 ergibt am Sensor 2*0.059 V = 0.118 V. Verstärkt man den Wert mit 6,
ergibt das +0,7 V.
Invertieren ergibt daraus –0,7 V.
Addiert man eine Offsetspannung von +2,45V dazu, ergibt sich +1,7V (pH
5).
Bei pH 0 wäre das Signal am Sensor 7*0.059 = 413 mV. Verstärkt mit 6
gibt das ca. +2,45 V.
Nach der Invertierung erscheint –2,45 V am Ausgang.
Mann addiert zu diesem Signal nun eine Offsetspannung von +2,45 V, damit
bei pH 0 das Signal auch 0 V und nicht –2,45 V ist. Auf diese Weise kann
man den Analog-/Digitaleingang des C-Control Steuercomputers verwenden
und den pH-Wert auf dem LCD Display ausgeben. Ohne die Invertierung
bekäme man ein falsches Ergebnis: PH 0 wären dann 5 V, pH 14 wären 0 V.
Die Formeln sind:
Verstärkung: A=(Volt pro pH) / 0.059
Offsetspannung: O=7* (Volt pro pH)
In meiner Schaltung habe ich gewählt: 100 mV / pH, das ergibt also:
A=0,35/0,059=5,93»6
O=7*0,35V=2,45 V
Um nun den Sensor zu eichen, baut man für die Verstärkung und den Offset
ein Potentiometer ein, damit man sie regeln kann.
Für die Eichung bei pH 7.00 benutzt man die Offsetspannung, für die
Eichung bei pH 4.00 die Verstärkung.
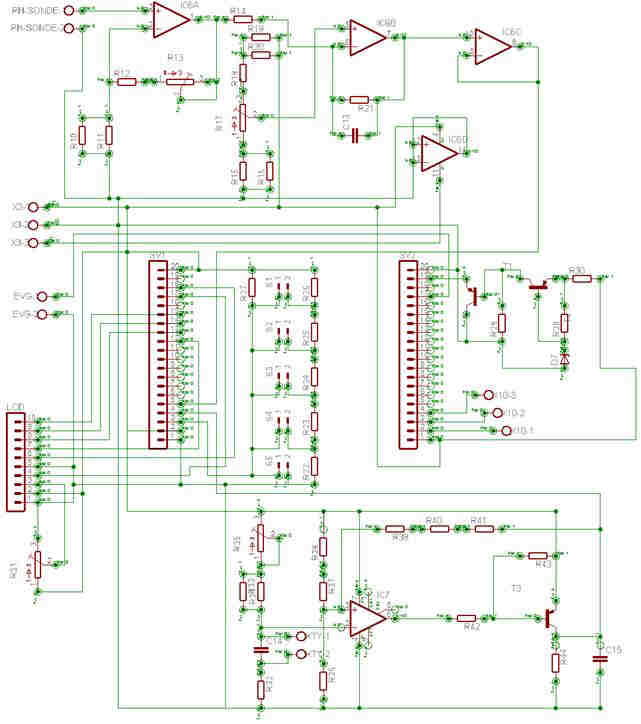
Beschreibung der Schaltung:
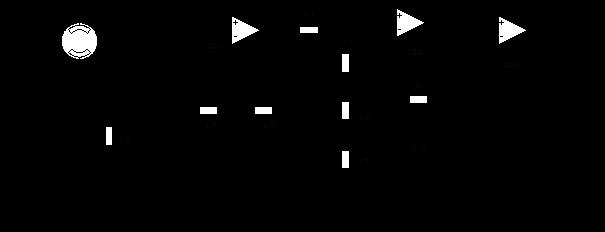
Zur Verstärkung wird ein Opamp vom Typ TL084 benutzt. Das Teil ist sehr
preiswert, aber trotzdem
ausreichend. Das Wichtige bei der Auswahl dieses Opamps ist der FET-
Eingang. Da ein pH- Sensor nur Ströme im fA (femto !) -Bereich
liefert, muss er sehr hochohmig sein. Der TL084 hat in einem Gehäuse 4
unabhängige Verstärker. Man benötigt daher nur 1 IC für die ganze
Schaltung.
Das Signal des Sensors wird per BNC- Stecker auf das IC6A gegeben.
Dieser wirkt als Verstärker, dessen Verstärkung durch R10/R11 und
R12+R13 festgelegt wird. Mit R13 kann man später die Verstärkung
einstellen.
Nach der Verstärkung erfolgt die Addierung der Offsetspannung sowie
gleichzeitig die Invertierung mit U1B. Dazu wird das Signal an den
invertierenden Eingang von U1B gelegt. Da dieser als Umkehraddierer
geschaltet ist, wird gleichzeitig die Spannung, die an Pin 5 von IC6B
liegt, addiert. (Die Spannung wird durch die Widerstände R15, R17 und
R18 gebildet; sie ist UOFF=(R15+R12) / (R18+R12);
Spannungsteilerregel).
Der Kondensator C13 ist sehr wichtig. Er filtert die 50 Hz-Netzspannung
und andere Störungen aus, damit der Wert nicht schwankt. Verstärkt,
invertiert und mit Offsetspannung versehen passiert das Signal IC6C, der
nur als Puffer dient.
Zum Abgleichen eines gegebenen pH-Sensors geht man wie folgt vor:
-Der Sensor wird in pH 7.00 getaucht und R12 solange gedreht, bis 7.00
auf der Anzeige steht.
-Danach nimmt man pH 4.00
und R11 dreht solange, bis 4.00 auf der Anzeige steht.
-Das ganze wiederholt man 3-4 mal, bis alles korrekt ist. Es empfiehlt
sich, das Gerät 20 Minuten vorher einzuschalten, damit die
Betriebstemperatur erreicht wird.
Die Schaltung ist so dimensioniert, dass mit R13 von pH 3 bis 5,25 und
mit R17 von pH 5,9 bis 8,5 geregelt werden kann.
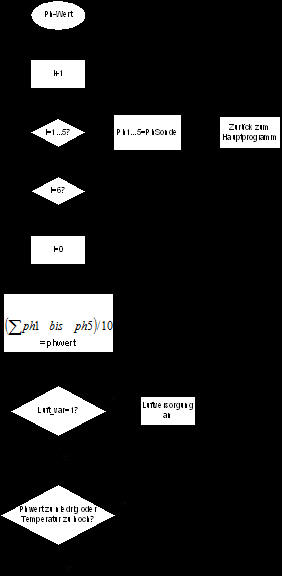
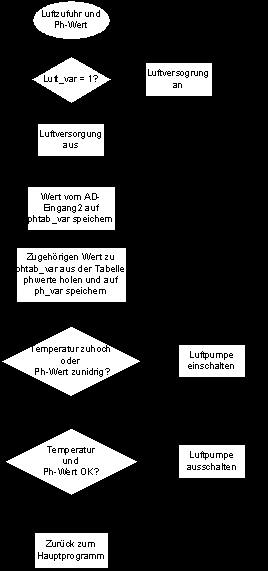
Damit der pH- Wert im C-Control ausgewertet werden kann, wird dieses vom
Analogwandler in einen Wert gewandelt, durch 2 geteilt und auf der
Variablen phwert gespeichert. Danach wird ein Digitalport,
welcher ein Relais für eine Luftversorgung ansteuert, eingeschaltet,
wenn der pH- Wert unter 5,5 sinkt oder die Temperatur höher als 4°C
über der Solltemperatur ist. Die Luftversorgung wird erst wieder
ausgeschaltet, wenn der pH- Wert über 7 ist und die Temperatur nur noch
2,5
°C
über dem Sollwert ist.
5.4. Das LCD-Display zur Anzeige der Messwerte

Flüssigkristallanzeigen (Liquid Crystal Display, kurz LCD)
zeichnen sich durch einen besonders geringen Stromverbrauch aus. Eine
LCD-Anzeige wird im Prinzip durch eine angelegte Wechselspannung
angesteuert.
Es gibt einfache LCD´s, deren Segmente an einzelne Anschlüsse geführt
werden, die durch komplexe Treiberbausteine angesteuert werden müssen.
Eine Alternative sind komplette LCD-Module mit Display-Controller. Es
gibt verschiedene Typen. Ich verwende eines mit 4X16 Zeichen. Jedes
Zeichen ist aus einer Punktmatrix mit 5X8 Einzelpunkten aufgebaut.
Der Display-Controller enthält einen integrierten Zeichengenerator, der
jedem darstellbaren Zeichen ein bestimmtes Bitmuster zuordnet. Der
Anwender braucht nur den ASCCII-Code eines gewünschten Zeichens an die
LCD-Anzeige zu senden, um das Zeichen dort darzustellen. Neben acht
bidirektionalen Datenleitungen verfügt die LCD-Anzeige über die
spezifischen Steuerleitungen EN (Enabel, Datenübertragung), RS
(Daten-/Kommandoumschaltung) und R/W ( Schreib-/Leseumschaltung). Das
bedeutet, dass 11 Digitalports der C-Control Unit zur Ansteuerung
benötigt werden.
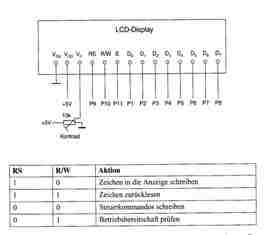
Zur Übertragung der Daten werden die oberen 4 Bits D7...D4 des
LCD-Moduls verwendet. Diese 4 Datenleitungen werden mit den Ports P9 bis
P12 der C-Conltol Unit verbunden. Wie schon erwähnt, benötigt die
LCD-Anzeige noch 3 Steuersignale. Da jedoch nur Daten in die LCD-Anzeige
übertragen werden, bleibt der R/W-Port des LCD fest auf LOW-Signal. Der
RS-Port wird mit P14 und der EN-Port P15 verbunden. Dabei werden mit der
negativen Flanke des Steuersignals die Daten modulintern gespeichert.
Dazu muss die Portleitung softwaremäßig 2 mal getoggelt(=umgeschaltet)
werden.
Erläuterungen zum Unterprogramm:
Für den Datentransfer werden zwei Bytes im Programm reserviert. Im LCD-Buffer
(var=lcd_buf) stehen diejenigen Informationen, die in zwei 4-Bit-Hälften
an den LCD-Port übergeben werden. Im Parameterspeicher (var = lcd_param)
werden Daten- bzw. Kommandobytes abgelegt. Hierbei erscheinen die Daten
als Text im LCD-Display, während die Kommandos ein bestimmtes Verhalten
des LCD-Moduls erzeugen (z. B. Display löschen, Cursor positionieren,
...).
Bei der Definition der Ports fällt auf, dass die Ports 13 bis 15 doppelt
definiert sind, da sie einmal einzeln und dann noch mal als Byteport
deklariert werden. Dies dient jedoch nur der einfacheren Ansteuerung des
LCD-Displays.
Danach werden die ASCII-Codes der Großbuchstaben des Alphabets
definiert, da man sonst im Programmablauf nicht den Buchstaben „X“
übertragen könnte, sondern nur seine Hexadezimalzahl „&H58“. Somit ist
die Definition der ASCII-Codes nicht zwingend notwendig. Sie dient
jedoch der Veranschaulichung des Programms bzw. der Möglichkeit zur
einfachen Abänderung. Bei größeren Programmen kann es somit auch
vorkommen, dass nicht genügend Speicherplatz zur Definition des
ASCII-Codes zur Verfügung steht.
Beim Aufruf des Unterprogramms LCD_INIT wird das LCD-Display
initialisiert. Dieses Unterprogramm sollte in jeder Anwendung, in der
dieses LCD-Display verwendet wird, vor der ersten Textausgabe aufgerufen
werden. Hier erfolgt die Einstellung des 4-Bit-Modes und das Löschen des
Displays. Das Unterprogramm zum Löschen des Displays lautet #LCD-CLS und
kann jederzeit auch als eigenständiges Unterprogramm aufgerufen werden.
Danach erfolgt die Textausgabe. Sie wird zeichenweise ausgeführt, indem
das vordefinierte Zeichen A_ ... Z_ oder die dazugehörige
Hexadezimalzahl des ASCII-Codes in den LCD-Parameterspeicher lcd_param
geschrieben wird und dann das Unterprogramm LCD_WRITECHAR aufgerufen
wird. Dort wird der RS-Port (Port Nr. 14) HIGH gesetzt, indem die
Variable lcd_buf gleich der binären Zahl $B00100000 gesetzt wird.
Dadurch werden die Daten, die an D4...D7 anliegen, als Text verarbeitet
und im Display dargestellt. Die Übertragung dieser Binärzahl erfolgt
automatisch im Unterprogramm LCD_WRITE. Hierfür muss zunächst die
Information, die in der Variablen lcd_param enthalten ist, viermal
bitweise nach rechts verschoben werden. Damit stehen die jetzt
höherwertigen Bits 7...4 rechtsbündig im Byte und die vier linksbündigen
Bits lauten alle 0.
Nun erfolgt die ODER-Verknüpfung der beiden Variablen
lcd_buf und lcd_param, wodurch die Informationen, die in beiden
Variablen enthalten sind, gemeinsam übertragen werden.
Wenn diese Information nun am LCD-Port anliegt, dann führt das Takten
der Enable-Leitung lcd_e zum Übertragen der Daten ins LCD-Modul.
Jetzt erfolgt die zweite Hälfte der Ausgabe. Hier wird der Parameter mit
UND-verknüpft, wobei die oberen vier Bits gelöscht werden. Damit stehen
die vier unteren Bits genau richtig an ihrem Platz, so dass es erneut
zur ODER-Verknüpfung von Buffer und Parameter kommen kann. Sobald Enable
zweimal getaktet wird, gelangen die Daten mit der negativen Flanke ins
Modul und das betreffende Byte ist komplett übertragen.
Mit dem Unterprogramm LCD_GOTOLINE kann der Cursor entweder in die erste
Zeile (lcd_param = 1) oder in die zweite Zeile (lcd_param = 2) gesetzt
werden.
So gelangen die Zeichen auf das Display. Für Kleinprojekte mit wenig
Displaytext ist dies vollkommen ausreichend. Wenn man jedoch ein
menügesteuertes Programm und somit viele Daten auf einem LCD-Display
ausgeben möchte, empfiehlt es sich, ein LCD-Display mit zusätzlichem
Displaycontroller zu verwenden, da jedes einzelne Zeichen, was
dargestellt werden soll, getrennt übermittelt werden muss. Durch den
begrenzten Programmspeicher der C-Control Basic Unit kann daher ein
menügesteuertes Programm nur eingeschränkt umgesetzt werden.2
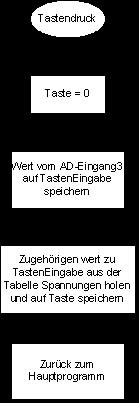
Theoretisch kann eine einzelne Leitung unendlich viele Spannungen
tragen. In der Praxis verwendet man Analog-/Digitalwandler, die einen
Spannungswert in ein digitales Bitmuster umsetzen.
Viele Mikrocontroller enthalten AD-Wandler, z.B. mit einer Auflösung von
acht Bit. Das bedeutet, es können 256 verschiedene Eingangsspannungen
unterschieden werden. Damit könnten theoretisch 256 Schalter über eine
einzige Leitung abgefragt werden. In der Praxis würde dies zu Problemen
führen, da die AD-Wandler ungenau sind durch geringe Störspannungen auf
der analogen Eingangsleitung. Dadurch können Fehler und
Unterscheidungsschwächen zwischen benachbarten Zuständen auftreten. Es
ist jedoch problemlos bis zu 15 Schalter über einen Analogeingang
abzufragen. Zur Einstellung der Werte der Aquariensteuerung werden 5
Schalter benötigt.
Zur Tastaturabfrage über eine Analogleitung verwendet man einen
Spannungsteiler aus 6 Widerständen, der durch Taster abgegriffen wird.
5.6. Der DCF77-Emfänger zum Empfang des Zeitsignals
Die Trägerfrequenz wird mit Sekundenmarken amplitudenmoduliert. Mit
Ausnahme der 59. Sekunde wird zu Beginn jeder Sekunde die
Trägeramplitude für die Dauer von 0,1s oder 0,2s auf etwa 25 %
abgesenkt. Durch das Fehlen der 59. Sekundenmarke wird die Sekunde 0 der
nächstfolgenden Minute angekündigt. Die unterschiedliche Dauer der
Sekundenmarken dient zur binären Codierung von Uhrzeit und Datum. Dabei
entsprechen Sekundenmarken mit einer Dauer von 0,1s der binären Null und
solche mit einer Dauer von 0,2s der binären Eins. Insgesamt lassen sich
auf diese Weise 59 digitale Bits übertragen. Aus diesen Bits kann nach
einer Minute die Zeitinformation zusammengestellt werden. Einmal während
jeder Minute werden also die Ziffern von Minute, Stunde, Tag, Wochentag,
Monat und Jahr BCD-codiert übertragen. Das übertragene Zeittelegramm
gilt jeweils für die folgende Minute.
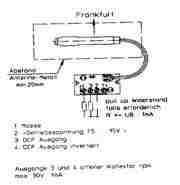
Der BN 641138 DCF77-Empfänger arbeitet mit einer Betriebsspannung
zwischen 1,5 - 15 V und benötigt 3 mA. Seine Ausgänge liefern das
digitalisierte Sekundensignal des DCF–Senders normal und invertiert. Bei
dem normalen Signal dauert eine Absenkung für einen LOW Digitalwert 80 –
120 ms, für einen HIGH Digitalwert 180 – 220 ms. Aus den 59
übermittelten Digitalwerten kann die Uhrzeit, das Datum usw. ermittelt
werden. Um den besten Empfang zu erhalten sollte die Breite der
Ferritantenne in Richtung Frankfurt zeigen.
Der Steuercomputer C-Control besitzt einen Eingang für einen
DCF77-Funkuhrempfänger. Damit ist ein sekundengenaues Ausführen von
Schaltfunktionen realisierbar. Alternativ dazu ist über den
DCF77-Eingang eine Frequenzmessung möglich.
Der Anschluss einer DCF77-Aktivantenne an den C-Control-/BASIC
Steuercomputer kann entweder über die dafür vorgesehene dreipolige
Stiftleiste (J3) oder über einen Spezialport an einer der beiden
Buchsenleisten erfolgen. Die dreipolige Stiftleiste stellt die
Spannungsversorgung für die Aktivantenne zur Verfügung (5V, GND) und
empfängt die Signalimpulse von der Antenne (DCF77). Die Antenne muss
dazu über einen Open-Collector-Ausgang nach Masse verfügen, der durch
das empfangene Signal geschaltet wird (low-getastet).
Bei Betrieb der C-Control-Unit mit einer DCF77-Aktivantenne informiert
die Grüne LED über den Status des Funkuhrempfängers. Blinkt sie im
Sekundentakt, dann ist die DCF77-Aktivantenne korrekt angeschlossen und
ein Funksignal wird empfangen. Stark unregelmäßiges Blinken deutet auf
Empfangsstörungen hin, die eventuell durch besseres Platzieren oder
Ausrichten der Antenne beseitigt werden können. Leuchtet die grüne LED
dauerhaft, dann wurde eine korrekte Zeitinformation empfangen die auch
quarztaktgesteuert weiterläuft, wenn zwischenzeitlich der Funkempfang
gestört sein sollte. Im C-Control wird die Zeit Variablen Day, Hour,
Minute, Month, Second und Year abgelegt.
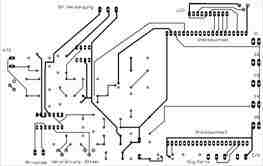
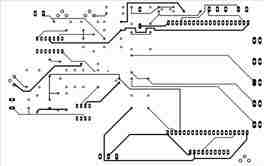
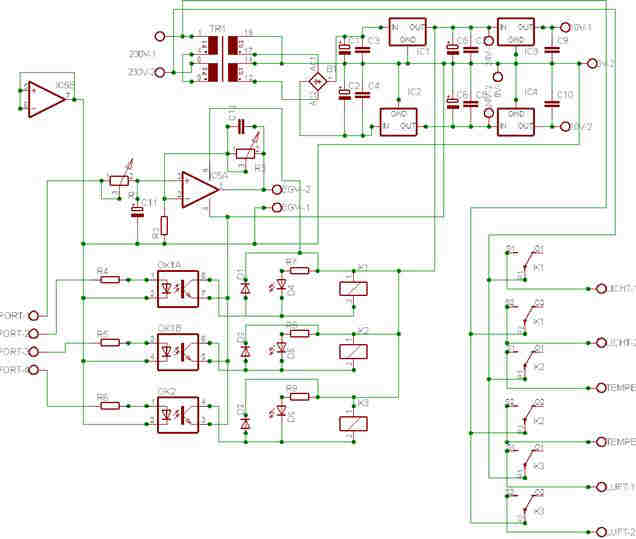
Angefertigt mit dem Layoutprogramm Eagle Version 6
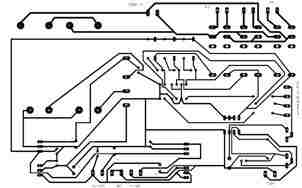
Unterseite der Platine mit Spannungsversorgung, Relais und
EVG-Ansteuerung
|
Oberseite der Platine mit Messverstärker für pH-Wert und
Temperatur, Tastatur, LCD-Anschluss und Steckerleisten für
den C-Control |
Unterseite |
Dazu druckt man das Layout auf Overhead-Folie (gibt es für Ink-Jet oder
Laser). Ein Laserdrucker ist natürlich idealer wegen der
Konturenschärfe. Mit einem guten Ink-Jet ist das Bedrucken aber auch
möglich. Es ist zunächst zu kontrollieren, ob die Abmaße korrekt sind
(vielleicht vorher auf normalem Papier ausprobieren!).
Belichtung der Platine:
Das ausgedruckte Layout muss mit UV-Licht auf den Fotopositivlack der
Platine übertragen werden. Dazu benötigt man eine Lage Schaumstoff (0,5
bis 2 cm dick), die größer als die Platine ist, eine Glasplatte, die
ebenfalls größer als die Platine ist sowie eine Lichtquelle mit hohem
UV-Anteil. Schaumstoff und Glasplatte haben bei mir die Abmessungen 15
cm x 20 cm. Das reicht für übliche Layouts.
Als Lichtquelle verwende ich eine 250 W Fotolampe (Nitraphot S250W).
So eine 250 W-Lampe entwickelt mehr Wärme, als die meisten
Lampenfassungen verkraften. Daher sollte man hier unbedingt auf eine
Porzellan-/Keramiklampenfassung zurückgreifen, und im Zweifelsfall
'häppchenweise' belichten (1 Minute belichten im Wechsel mit 2 Minuten
Abkühlzeit).
Eine Glasplatte aus Quarzglas verschluckt weniger UV-Licht als normales
Glas und ist deshalb besser geeignet. Mit normalem Glas lassen sich aber
die gleichen Ergebnisse erreichen- die Belichtungsdauer wäre dann etwas
länger.
Die Platine wird zunächst auf das benötigte Maß zurechtgeschnitten. Dann
wird vom zugeschnittenen Stück die Schutzfolie entfernt. Da der Lack
kaum tageslichtempfindlich ist, kann dies (wenn man schnell arbeitet)
bei normaler Beleuchtung geschehen.
Die Platine wird mit der Fotolackschicht nach oben auf den Schaumstoff
gelegt. Das spiegelbildlich ausgedruckte Layout wird mit der Druckseite
auf die Platine gelegt. Damit ist das Layout wieder seitenrichtig, und
zwischen Fotolack und Druckerfarbe ist kein Abstand für störendes
Streulicht (Konturenschärfe!). Darauf kommt nun die saubere Glasplatte.
Sie hat die Aufgabe dafür zu sorgen, dass das Layout platt auf der
Platine aufliegt und nicht verrutscht.
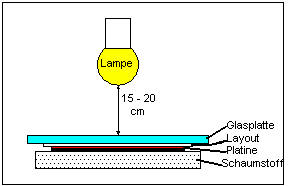
Ich befestige die Lampe ca. 15 cm bis 25 cm über der Platine und
belichte dann 6 –15 Minuten. Dies ist das Ergebnis einer
Belichtungstestreihe. Diese Zeit hängt aber von vielen Faktoren ab und
muss deshalb von jedem selbst ausprobiert werden.
Der Abstand der Lampe zur
Platine ist wichtig. Ein verdoppelter Abstand viertelt die UV-Strahlung!
Daher ist es wichtig, immer mit dem gleichen Abstand zu arbeiten. Die
Glasplatte verschluckt einen Teil der UV-Strahlung, also immer die
gleiche Glasplatte benutzen! Die Layoutvorlage ist je nach
Herstellungsverfahren (Tinte + Folie oder Toner + Transparentpapier)
unterschiedlich UV-transparent. Je nach Alter und Lagertemperatur sind
die Platinen unterschiedlich empfindlich. So können manchmal auch schon
3 Minuten ausreichend sein. Mir ist aufgefallen, dass „Noname-Material“
eine sehr unterschiedliche Belichtungszeit aufweist, und auch
verschieden empfindlich auf Entwickler reagiert. Wer die
Belichtungsexperimente im Rahmen halten möchte sollte auf
Marken-Platinen (Bungard) zurückgreifen. Diese sind etwas teurer, lassen
sich aber immer gleich gut verarbeiten.
Aufgrund der hohen Lichtleistung der Lampe verbietet sich es von selbst,
beim Belichten in die Lampe zu schauen. Der hohe UV-Anteil
ist schließlich für die Augen schädlich.
Muss es doch eine zweiseitige Platine sein, müssen beide Layouts
ausgedruckt und präzise zu einer Tasche verklebt
werden (Tesa). In diese Tasche wird die Platine zum Belichten
eingelegt, und mit Klebeband fixiert. Dann lassen sich nacheinander
beide Seiten belichten.
Wer mit Sonnenblumenöl-Layouts arbeitet, sollte die Platine vorsichtig
abwaschen, falls Öl auf die Platine gekommen ist.
Die anschließende Entwicklung mit Entwicklerlösung dauert ca. 1 min.
Anschließend wird die Platine unter fließendem Wasser
gründlich abgespült. Wenn richtig belichtet/entwickelt wurde,
müssen die Kontakte etwas dunkler und matter sein und dürfen jetzt noch
nicht leiten, da sich noch der Lack darauf befindet. Der Rest der
Platine sollte den typischen Kupferglanz haben. Er leitet auch, da sich
darauf kein Lack mehr befindet.
Die Platine ätzt man in Natriumpersulfat-Lösung bei etwa 50°C. Das ganze
dauert so lange, bis nur noch die Kontakte und die Leiterbahnen übrig
sind (ab und zu bewegen, dauert ca 20 min). Danach muss die Platine
abgespült werden. Des weiteren ist auch bekannt, dass Kupfer im Laufe
der Zeit oxidiert, gerade in warmer Umgebung. Optimal ist es daher, die
Kontakte zu verzinnen (galvanisieren).
|
Bauteilbezeichnung |
Wert |
Kenzeichnung |
Anzahl |
|
Widerstand |
100k Ohm |
R2,R10,R16,R14,R21 |
5 |
|
Widerstand |
330 Ohm |
R4,R5,R6 |
3 |
|
Widerstand |
2,2k Ohm |
R7,R8,R9 |
3 |
|
Widerstand |
18k Ohm |
R11 |
1 |
|
Widerstand |
43k Ohm |
R12 |
1 |
|
Widerstand |
680k Ohm |
R15 |
1 |
|
Widerstand |
12k Ohm |
R18 |
1 |
|
Widerstand |
82k Ohm |
R20 |
1 |
|
Widerstand |
2,7M Ohm |
R19 |
1 |
|
Widerstand |
560k Ohm |
R27 |
1 |
|
Widerstand |
27k Ohm |
R26 |
1 |
|
Widerstand |
3,3k Ohm |
R22,R23,R24,R25,R29 |
5 |
|
Widerstand |
10k Ohm |
R28,R36,R37 |
3 |
|
Widerstand |
1k Ohm |
R30,R32,R43,R44 |
4 |
|
Widerstand |
4,7k Ohm |
R33 |
1 |
|
Widerstand |
8,4k Ohm |
R34 |
1 |
|
Widerstand |
10 Ohm |
R38 |
1 |
|
Widerstand |
120k Ohm |
R39 |
1 |
|
Widerstand |
33k Ohm |
R40 |
1 |
|
Widerstand |
680 Ohm |
R41 |
1 |
|
Widerstand |
2,7k Ohm |
R 42 |
1 |
|
Poti |
100k Ohm |
R1,R3 |
1 |
|
Poti |
25k Ohm |
R3,R17 |
2 |
|
Poti |
50km Ohm |
R13 |
1 |
|
Poti |
100 Ohm |
R35 |
1 |
|
Kondensator (Elko) |
220µF |
C1,C2,C5,C6 |
4 |
|
Kondensator |
100nF |
C3,C4,C7,C8,C9,C10,C12,C11,C14,C15 |
10 |
|
Kondensator |
220nF |
C13 |
1 |
|
IC |
7812 |
IC1 |
1 |
|
IC |
7912 |
IC2 |
1 |
|
IC |
7805 |
IC3 |
1 |
|
IC |
7905 |
IC4 |
1 |
|
IC |
LM358 |
IC5 |
1 |
|
IC |
TL084 |
IC6 |
1 |
|
IC |
µA741 |
IC7 |
1 |
|
Diode |
1N4148 |
D1,D2,D3 |
3 |
|
Z-Diode |
BZX 55C 4V7 |
D7 |
1 |
|
LED |
Blau |
D4,D5,D6 |
3 |
|
LED |
Grün 24V |
Betriesanzeige |
1 |
|
Transistor |
C557B |
T1,T2 |
2 |
|
Transistor |
BC560C |
T3 |
1 |
|
LCD-Modul |
4X16 |
|
1 |
|
DCF77-Emfänger |
BN 641138 |
|
1 |
|
EVG |
HF2x18/230-240 DIM |
|
1 |
|
Steuercomputer |
C-Control/Basic |
|
1 |
|
Ph-Sensor |
von Dennerle |
|
1 |
|
Temperatursensor |
KTY 10 |
|
1 |
|
Trafo |
TR1 |
UI 39/13,5 (2X12V) |
1 |
|
Relais |
RP420012 |
K1,K2,K3 |
3 |
|
Optokoppler |
PC8171 |
OK1 |
1 |
|
Optokoppler |
PC8172 |
OK2 |
1 |
|
Gleichrichter |
B80-C5000-3300 |
B1 |
1 |
|
Schraubklemmen |
RM5/7,5mm-2er |
|
13 |
|
Schraubklemmen |
RM5/7,5mm-3er |
|
2 |
|
Stiftleiste |
RM 2,54-20pol |
SV1,SV2 |
2 |
|
Stiftleiste |
RM 2,54-10pol |
LCD |
1 |
9.1 Inbetriebnahme des Controllers
Um den Controller richtig nutzen zu
können, ist folgendes zu beachten:
·
Vor dem Einsetzen der C-Controller-Platine sind die beiden Jumper J4
(RS232-Schnittstelle) und J5 (Auto-Start) zu stecken.
·
C-Control/Basic-Platine auf die
Messverstärkerplatine aufstecken.
·
Anschließen der +5V/-5V Versorgungsspannung
·
Verbinden der 3 Digitalports und des Analogausgangs mit den
Relais-Treibern und dem Verstärker.
·
Anschluss der DCF77-Antenne
·
Verbindung von PC und C-Control herstellen mit einem gerade
durchgeschleiften RS232-Verbindungskabel, also eines mit einem
männlichen und einem weiblichen neunpoligen Sub-D Stecker.
·
Installation der C-Control-Programmiersoftware und Einstellung der
Verbindungs-Parameter auf:
Bit pro Sekunde: 9600
Daten Bits: 8
Stop Bits: 1
Flussteuerung: kein Protokoll
·
Netzteil einschalten (auf keinen Fall vorher!)
·
Laden des C-Basic-Programms
·
Kompilieren des C-Basic-Programms
·
Übertragen des C-Basic-Programms zur C-Control. Dabei leuchtet die rote
LED auf der Kommunikationsplatine so lange, bis die Übertragung beendet
ist.
·
Zum Starten des Controllers die Start-Taste betätigen. (zum
Stoppen die Stopp-Taste)
9.2 Inbetriebnahme der Messverstärker
Die Messverstärker, die an den Analogeingängen des Controllers
angeschlossen werden, sind in zwei Gruppen gegliedert:
1.
Messverstärker mit niederohmigen Eingängen
2.
Messverstärker mit hochohmigen Eingängen
Zu 1:
Die Messverstärker mit niederohmigen Eingängen, wie der
Temperaturfühler, sind gegenüber Einflüssen von außen relativ
unempfindlich. Dennoch können Störeinstrahlungen durch
elektromagnetische Felder zu Fehlmessungen führen, wenn die Fühler
unmittelbar im Bereich von Neonröhren oder in fließendem Wasser
untergebracht sind. In diesen Fällen sollte der Fühler mit einem
geerdeten Edelstahlrohr umgeben sein, welches gleichzeitig als Erdung
für das Aquarium dienen kann.
Zu 2:
Die Messverstärker mit hochohmigen Eingängen, wie das pH-Meter, sind
hochempfindlich und können mit Leichtigkeit Funkwellen empfangen, wenn
die Eingänge unsachgemäß eingerichtet und verkabelt sind. Sie sind sogar
so empfindlich, dass ein Lufthauch eine Messwertänderung bewirkt. Bevor
solch ein Messverstärker fest eingebaut wird, sollte daher ein über
mehrere Tage verlaufender Test erfolgen, um festzustellen, ob Störungen
auftreten. Dazu wird er mit seinem Ausgang an ein Digitalvoltmeter oder
ein Oszilloskop angeschlossen und geprüft, ob die Ausgangsspannung bei
ordnungsgemäß angeschlossener Elektrode stabil bleibt. Der Anschluss der
Elektrode erfolgt bei beiden Geräten unmittelbar an dem hochgebogenen
Beinchen des IC-Eingangs. Es muss dafür gesorgt werden, dass die
Verbindung zwischen Platine und BNC-Buchse nicht länger als ca. drei
Zentimeter wird. Der Isolationskörper der BNC-Buchse muss am Besten
durch Eintauchen der Buchse in Azeton nach dem Anlöten von allen Lot-
und Fettresten befreit sein, damit zwischen der Seele und dem
Buchsengehäuse nicht etwa ein Fingerabdruck den Eingangswiderstand
vermindert. Genauso verfährt man mit der Lötseite der Platine, die mit
einem in Azeton getränkten, sauberen Taschentuch von allen Fett- und
Lotresten gereinigt werden muss. Besteht danach das Gerät den Test,
wobei Abweichungen von +/- 1 Digit auftreten dürfen, dann kann es
endgültig in das Gehäuse eingebaut werden.
Sollten größere Messwertschwankungen auftreten, dann sollte zunächst
überprüft werden, ob die Platine sauber gelötet und entfettet ist. Ist
letzteres der Fall, dann können die Schwankungen durch neue Elektroden
erzeugt sein, welche erst einige Zeit benötigen, bis sich die chemischen
Abläufe in ihnen beruhigt haben. Sind alle Bedingungen erfüllt, dann
rühren Messwertschwankungen nur noch von äußeren Einflüssen her, z.B.
durch einen Sender in näherer Umgebung, der in das nur einfach
geschirmte Kabel der Elektroden einstrahlt. Genauso stören auch Trafos,
Neonleuchten, Pumpenmotore u.s.w..
Es ist nicht ganz einfach, in solchen Fällen Abhilfe zu schaffen.
Zunächst einmal sollten dann die Messverstärker in eigene kleine
Metallgehäuse eingebaut werden. Eine erhebliche Verbesserung wird
erzielt, wenn das Aquarium geerdet ist. Dazu braucht man nur unten und
oben offene Edelstahlrohre zu verwenden, die am Erdleiter angeschlossen
werden, und in deren Zentrum die Elektroden mit einem Abstandhalter
positioniert werden.
Fließendes Wasser bildet für hochempfindliche Elektroden ein sehr
schlechtes Milieu, weil sich Spannungsfelder unkontrolliert aufbauen und
zu erheblichen Fehlmessungen führen. In diesem Fall hilft dann ebenfalls
oft eine Abschirmung der Elektrode, die gleichzeitig für eine Beruhigung
der Wasserbewegung innerhalb des Rohres sorgt.
Messverstärkerplatine:
Spannungsversorgungs-, Relais-, Treiber- und Verstärkerplatine:
11. Quellenangaben
Web:
-
www.osram.de
-
www.jmeyer.de
-
www.klopfernet.de/index.htm
-
www.c-control.conrad.de
-
www.ibdoerre.com/aqua
-
www.aquarix.de/de/diy/phmeter.asp
Bücher:
-
Erfolgreich automatisieren mit dem C-Control von B.Kluth / C.Kluth
-
MSR mit dem C-Conlrol/Basic System von Burkhard Kainka
-
Mikrocomputertechnik mit den Prozessoren der 68000-Familie